Field Operational Test Projects
FOT in the Tokyo Waterfront Area
1. Overview
(1) Outline
-
On general roads with complicated traffic environment where vehicles cross and pedestrians come and go, it is difficult to realize automated driving only with information from on-board sensors. Also on expressways, it is hard to check the traffic conditions on the main lane in advance, and it may be difficult to continue automated driving at the merging lane. Based on these, SIP-adus endeavored to realize automated driving by providing information from the road traffic infrastructure.
Therefore, Field Operational Tests in Tokyo waterfront area (FOTs) were conducted commencing in 2019 to verify the utilization of semi-dynamic data and dynamic data for automated driving technology, such as merging lane assistance information, traffic congestion information and traffic signal data, etc. provided by the road traffic infrastructure, in addition to the high-precision 3D map information (static data) of the “Dynamic Map” that was put into practical use in the first phase of SIP-adus.
In 2021, the mechanism for generating and distributing the traffic environment data, which is distributed via the Public Long Range Network, and the effectiveness of the data was verified (1-1.), and FOTs were conducted to verify the consistency of the validation platform in the virtual space (DIVP®: Driving Intelligence Validation Platform), with the real environment in the Tokyo Waterfront City area, which is the field of FOTs in Tokyo waterfront area (1-2.), to appeal our technology to in and out of Japan. 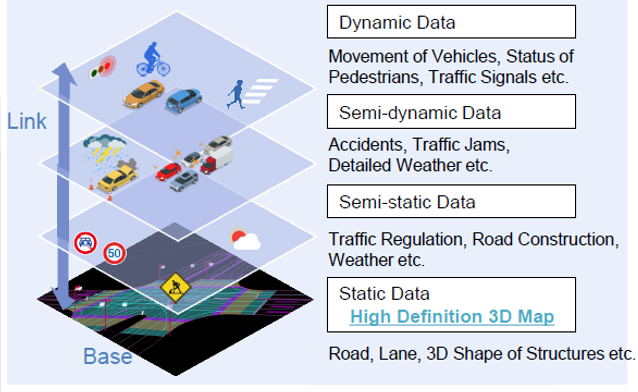
(2) Test period
- From October 2019 to 23 December 2022
(3) Inquiries
- Office of FOTs in the Tokyo Waterfront Area: Tel.: +81-3-5308-0909 (Weekdays 9 a.m. - 5 p.m. JST)
(4) Participants
-
FOTs were conducted through collaboration between the public and private sectors.
SIP-adus led by the Cabinet Office, Government of Japan coordinated and provided the traffic infrastructure. The participants took part in the FOTs with their own automated vehicles and test drivers. Simultaneously, they collected/analyzed test data and reported their test results.
As the result of calling for participants for FOTs, 22 organizations, including automobile manufacturers, suppliers, and universities in Japan and other countries took part in the FOTs. Based on this exceptionally large number of participants, unequalled even on an international scale, through conducting tests & obtaining data, and offering a forum for open debate, this program drove forward international harmonization and standardization in this same field.
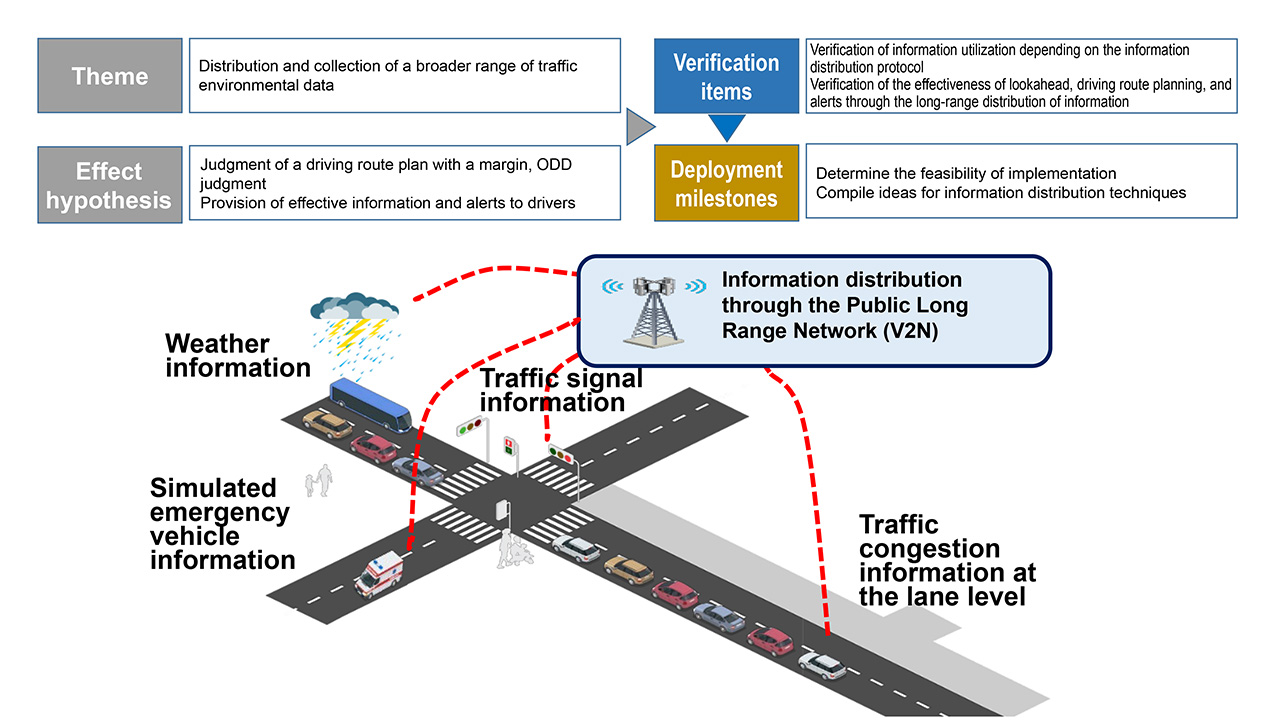
1-1. Distribution of traffic environment data through the Public Long Range Network (V2N)
(1) Outline
-
To promote broader use of the traffic environment data, verification was conducted in more diverse cases by establishing an FOT environment that could distribute and use the traffic environment data through the Public Long Range Network (V2N), in addition to other information which has been developed, including the high-precision 3D map data as well as traffic signal information and merging lane assistance information distributed via short range communication (V2I).
New traffic environment data: traffic information at the lane level using the probe vehicle data, weather information, simulated emergency vehicle information, traffic signal information, etc.
(2) Test period
-
Implemented from October 2021 to the end of March 2022
(3) Example of FOT technology (FOTs by V2N)
1-2. Building a safety evaluation environment in virtual space
(1) Outline
-
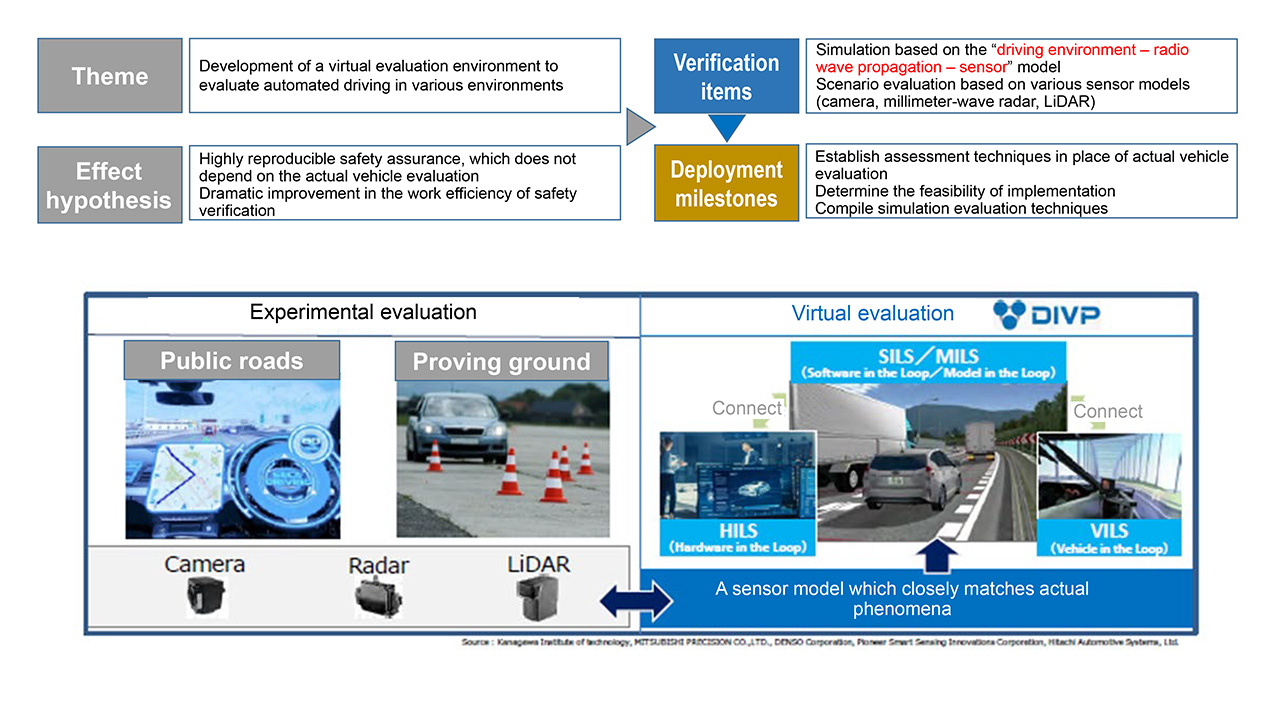
To verify highly reproducible safety evaluation in various traffic environments, efforts were made to build DIVP® (Driving Intelligence Validation Platform), a validation platform in virtual space simulating mainly the environment of the Tokyo Waterfront City area, which features a simulation model (driving environment – radio wave propagation – sensor) which is highly consistent with actual phenomena and therefore can substitute for FOT evaluation in the real environment. The usefulness of simulation based on the “driving environment – radio wave propagation – sensor” model was verified.
(2) Test period
-
Implemented from November 2021 to the end of April 2022
(3) Example of FOT technology (FOTs by simulation)
2.Tokyo waterfront city area (General roads)